


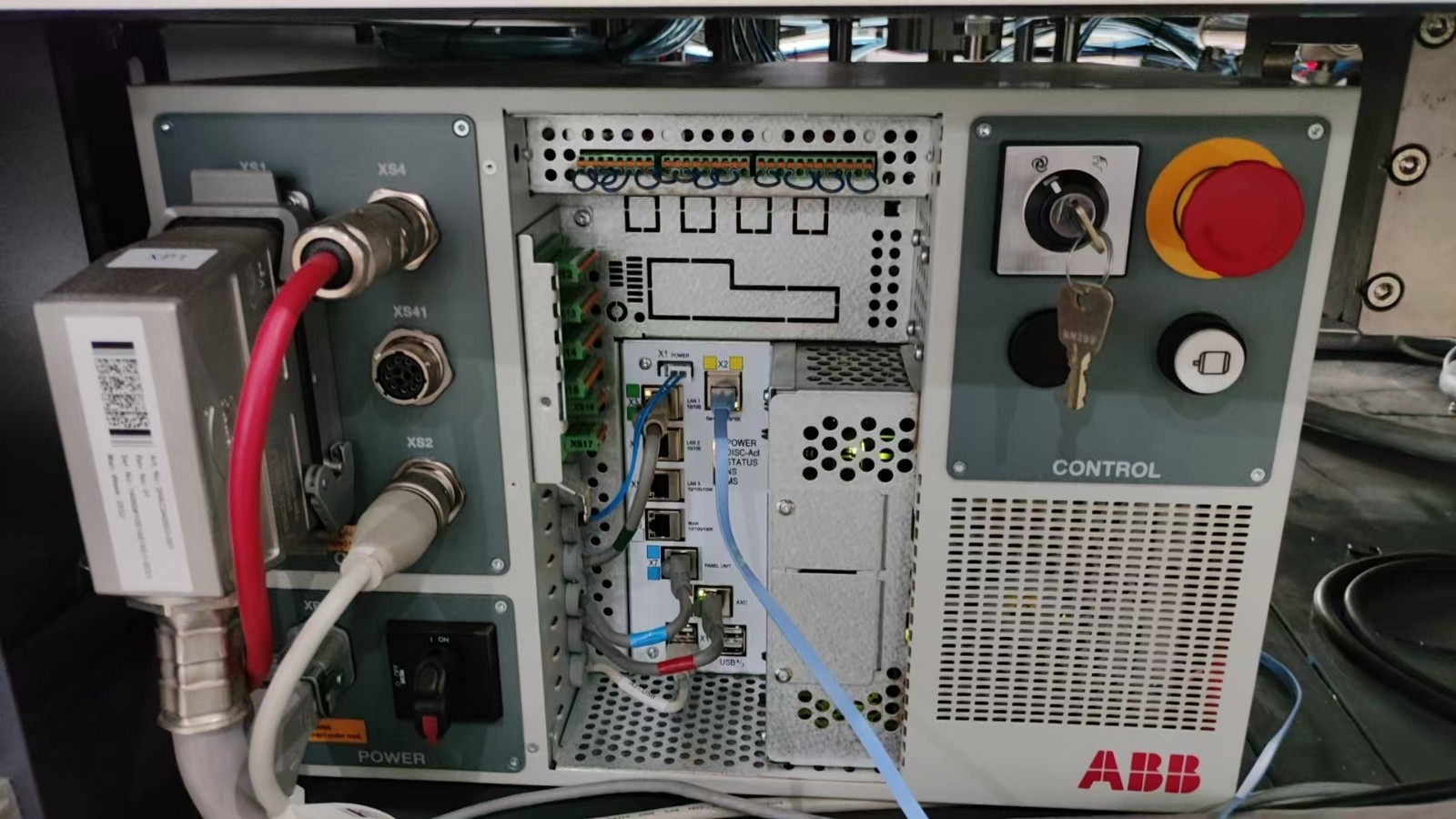
ABB 协作机器人 Powa 控制柜(E10_TypeA)的接线需遵循安全规范和设备手册要求,涉及电源、I/O 接口、急停、示教器等关键部分。以下是核心接线说明(请结合官方图纸操作,确保断电作业):
一、安全注意事项
接线前务必断开控制柜主电源,确认无电压残留。
急停、安全回路等涉及人身安全的接线需严格遵循 EN ISO 13849 等安全标准。
电源电缆需符合额定规格(如主电源需匹配控制柜功率需求)。
二、主电源接线(Power Input)
接口位置:控制柜背面的主电源接口(通常标记为 “AC INPUT” 或带电源符号),可能为端子排或工业插座。
接线规格:
输入电压:通常支持三相 AC 380-480V(具体以设备铭牌为准),部分型号兼容单相 AC 220V(需确认)。
电缆规格:根据额定电流选择(如 6-10mm² 铜缆),需包含相线(L1、L2、L3)、中性线(N)、地线(PE)。
接线步骤:
剥线后接入对应端子:L1、L2、L3 接相线,N 接中性线,PE 接保护地线(黄绿双色线,务必可靠接地)。
拧紧端子螺丝,确保无松动或裸露导体。
三、急停回路(Emergency Stop)
接口定义:控制柜内通常有急停端子排(标记为 “E-STOP” 或 “EMERGENCY”),包含急停输入、输出触点(常闭 / 常开)。
接线要求:
急停回路需构成安全回路,通常采用双回路常闭触点(遵循 SIL2/PLd 以上等级)。
外部急停按钮(如控制柜面板急停、外部扩展急停)的常闭触点需串联接入急停回路。
端子通常标记为:E-STOP IN1、E-STOP IN2(输入),E-STOP OUT1、E-STOP OUT2(输出,用于扩展)。
注意:急停回路断开时,机器人需立即停止所有运动并切断驱动电源。
四、I/O 接口接线(Digital I/O)
接口位置:控制柜正面或侧面的 I/O 端子排(可能标记为 “DI”“DO”),通常为 16 路或 32 路数字量输入 / 输出。
接线定义:
例:DO1 接外部负载正极,负载负极接 0V,或通过继电器扩展大电流负载。
例:DI1 接外部信号正极,0V 接外部信号负极,内部 24V + 可直接供电(或外部 24V 需共地)。
数字输入(DI):接收外部信号(如传感器、按钮),端子标记为 DI1-DIn,需外接 24V 电源(通常提供内部 24V+,标记为 “24V+”“0V”)。
数字输出(DO):输出控制信号(如继电器、指示灯),端子标记为 DO1-DOn,通常为晶体管输出(集电极开路或推挽,额定 24V/0.5A)。
公共端:DI/DO 可能共用 0V 公共端,需确认端子排标识(如 “COM” 或 “0V”)。
五、示教器(FlexPendant)接线
接口位置:控制柜正面的示教器专用接口(通常为圆形多芯插头,带锁扣)。
接线方式:直接插入示教器电缆插头,顺时针旋转锁扣固定,确保接触可靠(无需手动接线,电缆为预制线)。
六、其他关键接口
EtherNet/IP 网络接口:控制柜背面的 RJ45 网口(标记为 “EtherNet” 或 “LAN”),用于连接 RobotStudio、PLC 或其他设备,直接插入网线即可(需配置 IP 地址)。
安全门联锁(Guard Lock):若有安全门接口(标记为 “GUARD LOCK”),需接入安全门锁的常闭触点,构成安全停止回路(类似急停逻辑)。
外部轴 / 附加轴接口:若扩展外部轴,需连接对应动力线和编码器线(需参考外部轴手册,通常为专用接口)。
七、接线后检查
确认所有接线牢固,无短路(用万用表测量绝缘电阻,确保相线与地线、相线之间无导通)。
检查地线连接是否可靠(接地电阻需≤4Ω)。
首次上电时,先接通主电源,观察控制柜指示灯是否正常(无故障报警),再启动机器人系统。
注意事项
具体端子定义和引脚分布以控制柜内部的接线图标签为准(通常贴于柜门内侧)。
若涉及模拟量 I/O 或特殊通信协议(如 Profinet),需参考对应选项卡的接线说明。
建议由具备资质的电工或机器人工程师操作,避免因接线错误导致设备损坏或安全事故。
