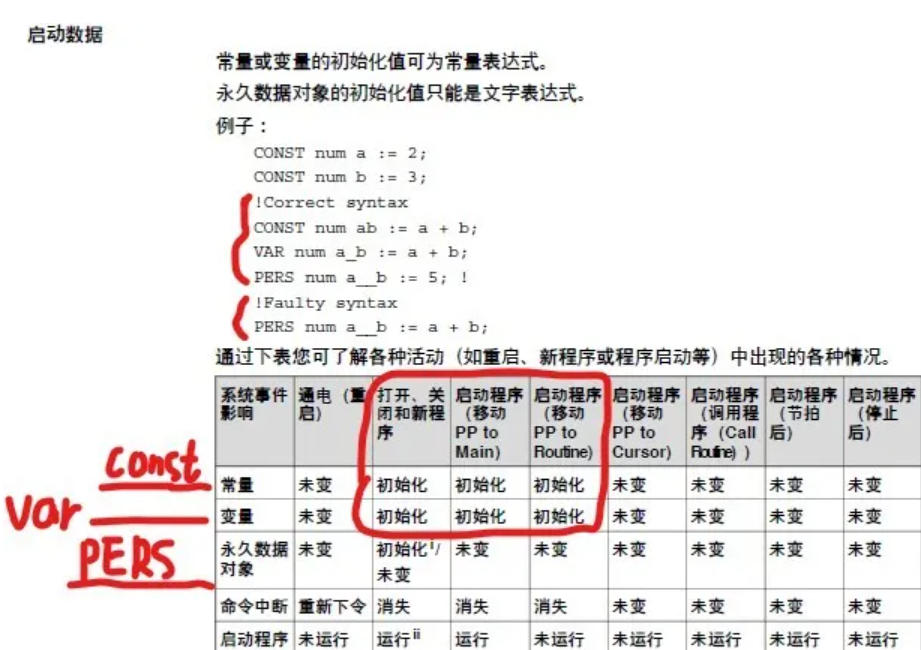
在 ABB 机器人的 Rapid 编程语言中,VAR、PERS和CONST是用于声明数据的关键字,它们的核心区别在于数据的生命周期(作用范围和存续时间) 和可修改性,具体如下:
定义:声明一个常量,其值在程序编译(或首次加载)后不可修改。
生命周期:常量在整个机器人系统运行期间(从程序启动到关闭)始终存在,且值固定。
作用范围:
用途:用于存储固定不变的值,如机械参数(如工具重量、固定坐标点)、数学常量(如 π)等,避免意外修改。
示例:
rapid
CONST num PI = 3.14159; // 全局常量
PROC main()
CONST pos HOME_POS = [0,0,500,0,0,0]; // 局部常量
ENDPROC
定义:声明一个持久变量,其值在程序执行中断、机器人重启甚至系统断电后仍会保留(存储在控制柜的非易失性内存中)。
生命周期:变量值会被永久保存,除非主动修改或通过程序重置。
作用范围:仅在声明它的模块(Module)内全局有效,其他模块无法直接访问(需通过模块间调用)。
用途:用于存储需要长期保存的状态信息,如生产计数、机器人累计运行时间、上次执行的任务参数等。
示例:
rapid
PERS num PROD_COUNT = 0; // 生产计数器,断电后值不丢失
PERS bool LAST_STATE = FALSE; // 上次运行的状态标记
定义:声明一个临时变量,其值仅在程序执行期间有效,程序结束、机器人重启或断电后会丢失(重置为初始值或默认值)。
生命周期:
作用范围:
全局VAR:模块内所有程序可访问;
局部VAR:仅在所属程序内部有效。
用途:用于存储程序执行过程中的临时数据,如中间计算结果、循环变量、临时坐标等。
示例:
rapid
VAR num TEMP_NUM; // 全局临时变量
PROC main()
VAR pos MOVE_POS; // 局部临时变量,仅在main中有效
TEMP_NUM := 10;
MOVE_POS := [100,200,300,0,0,0];
ENDPROC
| 关键字 | 可修改性 | 生命周期(值的存续性) | 作用范围 | 典型用途 |
|---|
CONST | 不可修改 | 系统运行期间永久存在,值固定 | 模块内全局或程序内局部 | 固定参数、常量值 |
PERS | 可修改 | 断电 / 重启后仍保留,永久存储 | 仅声明模块内全局 | 生产计数、状态记忆 |
VAR | 可修改 | 程序执行期间有效,断电 / 重启后丢失 | 模块内全局或程序内局部 | 临时计算、中间变量 |
在 ABB 机器人的 Rapid 程序中使用VAR、PERS和CONST时,需注意以下细节,以避免逻辑错误、内存浪费或系统异常:
初始值必须声明时赋值CONST必须在声明时定义初始值,且后续无法通过程序修改(包括Set、赋值语句等),否则会报编译错误。✅ 正确:ConST num MAX_SPEED = 500;❌ 错误:ConST num MAX_SPEED; // 未赋值 或 MAX_SPEED := 600; // 试图修改
作用范围与命名冲突
适用场景限制仅用于绝对固定的值(如机械参数、固定坐标、数学常量),避免将可能变化的值声明为CONST(如需要定期校准的参数)。
存储特性与内存占用
作用范围严格限制PERS仅在声明它的模块内全局有效,其他模块无法直接访问。若需跨模块使用,需通过模块间的程序调用(如将PERS作为参数传递)。例:模块 A 中声明PERS num COUNT;,模块 B 需调用模块 A 的GetCount()程序获取该值,而非直接访问COUNT。
初始值与重置
生命周期与初始值
全局VAR(模块内声明):在模块加载后初始化,系统重启或程序重新加载时重置为初始值(若未声明初始值,则为默认值,如num类型默认 0,pos默认 [0,0,0,0,0,0])。
局部VAR(程序内声明):仅在程序执行期间有效,程序结束后自动释放,再次调用时重新初始化。⚠️ 注意:局部VAR若未声明初始值,首次使用前需赋值,否则可能因默认值导致逻辑错误(如用未赋值的pos变量执行运动指令)。
作用范围与内存释放
同名变量的优先级程序内的局部VAR与模块内的全局VAR同名时,局部变量优先,全局变量会被临时屏蔽。例如:
rapid
VAR num temp = 10; // 全局变量
PROC main()
VAR num temp = 20; // 局部变量,覆盖全局
TPWrite "temp = " + ValToStr(temp); // 输出20
ENDPROC
数据类型一致性声明时需明确数据类型(如num、pos、bool、string等),且赋值时必须与类型匹配,否则会报类型错误。❌ 错误:ConST pos HOME; HOME := [100,200,300,0,0,0]; // 常量赋值错误 或 VAR bool flag; flag := 123; // 类型不匹配
命名规范
跨模块数据访问
调试与监控
CONST:用于不可变的固定值,确保数据安全性,声明时必须赋值。
PERS:用于需长期保存的数据,注意作用范围和存储效率,避免滥用。
VAR:用于临时数据,注意生命周期和作用范围,优先使用局部变量减少内存占用。
合理选择关键字可提高程序的可读性、安全性和执行效率,尤其在复杂项目中需严格规范变量的声明与使用。



