在机器人运行过程中,若因暂停(如手动暂停、程序断点、外部信号触发暂停)后重启,常出现自动降速现象,这通常与系统安全机制、运动缓冲参数或程序逻辑相关。以下是具体原因分析及解决方法:
系统安全保护机制触发机器人暂停后重启时,系统默认进入 “低风险启动模式”,尤其是在带负载运行、路径复杂或涉及外轴协同的场景下,为避免急加速导致机械冲击或轨迹偏差,会自动降低启动阶段的速度(通常为额定速度的 20%-50%),待运动稳定后逐步恢复。
运动缓冲参数(Buffer)设置程序中若启用了运动缓冲功能(如MoveL/MoveJ指令中的z参数或\Buffered选项),暂停后重启时,系统需重新计算路径缓冲,可能导致重启瞬间速度被限制,以确保路径平滑过渡。
程序断点处的速度限制若暂停发生在非运动指令段(如WaitTime、IF判断),重启后首个运动指令可能因 “初始加速度限制” 参数(如$ACC、$JERK)被系统强制降速,尤其当断点前的运动状态未被完整保存时。
外部轴协同延迟若机器人与外轴联动,暂停后外轴位置反馈可能存在微小偏差,重启时系统为同步机器人与外轴的运动,会降低整体速度以补偿偏差,避免轨迹偏移。
系统故障或报警残留若暂停由轻微故障(如瞬时过载、通信波动)触发,即使故障已解除,系统可能保留 “降速保护” 状态,需手动复位才能恢复正常速度。
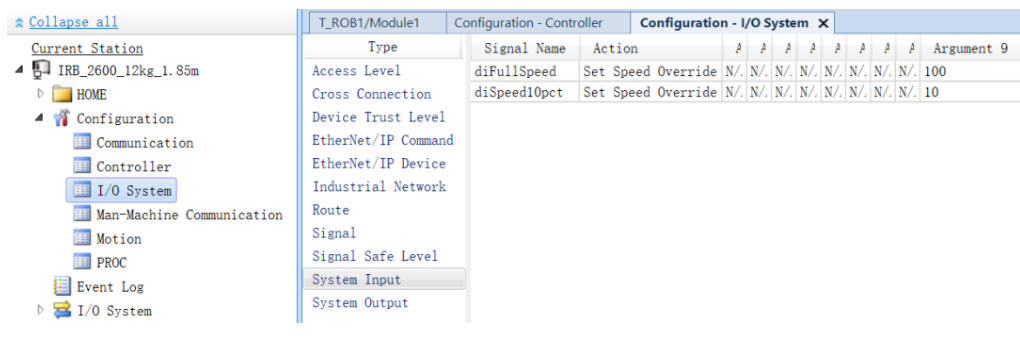
通过示教器或 RobotStudio 修改 “重启速度限制” 参数,适用于希望重启后快速恢复额定速度的场景(需确保机械负载和路径安全):
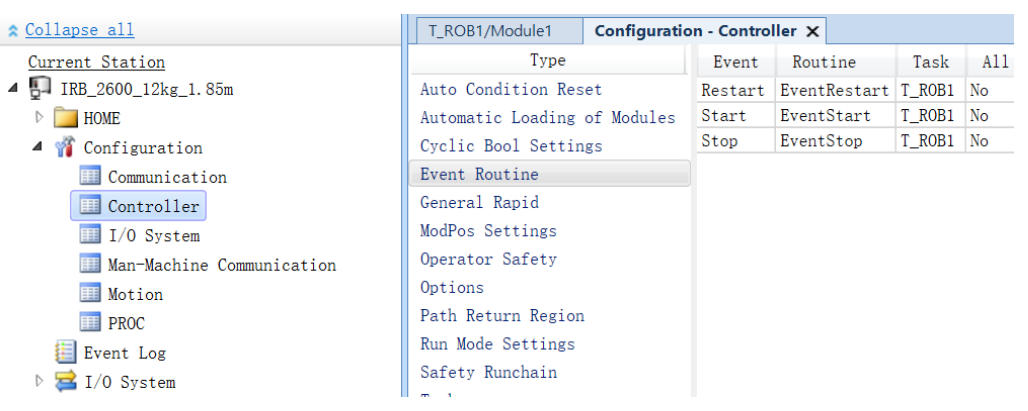
进入 “控制面板”→“运动设置”→“启动行为”(或对应语言的 “Start Behavior”)。
找到 “重启初始速度百分比”(如$RESTART_SPEED),默认值通常为 30%,可根据需求调整至 100%(需谨慎,避免冲击)。
若涉及外轴,需同步修改外轴对应的 “机械单元启动速度” 参数(在 “Mechanical Unit” 配置中)。
若降速由缓冲逻辑导致,可在程序中调整运动指令的缓冲参数:
对于连续运动段,取消\Buffered选项(或使用z0代替z50等缓冲值),强制系统在重启时直接按指令速度启动(可能牺牲部分平滑性)。示例:
plaintext
MoveL p1, v1000, z0, tool1; // 无缓冲,重启后直接以v1000运行
若需保留缓冲,可在重启后的首个运动指令前添加SetSpeed指令强制指定速度:
plaintext
若暂停后重启时速度受限与断点状态相关,可通过程序逻辑重置运动状态:
PROC Main()
! 重启后重置运动状态
Reset $motion_status; // 清除运动状态标志(具体参数需参考系统手册)
SetSpeed v1000; // 强制恢复额定速度
MoveL p1, v1000, z50, tool1;
ENDPROC
对于手动暂停后重启,可在示教器中执行 “手动操纵→速度设置→恢复默认速度”,取消临时速度限制。
若外轴导致降速,需校准机器人与外轴的位置同步性:
执行 “校准→机械单元→同步校准”,确保外轴与机器人基座的相对位置参数准确。
在联动程序中添加WaitForMechanicalUnit指令,确保外轴准备就绪后再启动高速运动:
plaintext
WaitForMechanicalUnit TurnTable; // 等待外轴“TurnTable”就绪
MoveL p1, v1000, z50, tool1\WObj:=wobj_TurnTable;
若降速由隐性故障导致,需检查系统日志并复位:
提高重启速度可能增加机械冲击风险,需在调试阶段验证负载稳定性(如通过LoadIdentify校准负载惯量)。
对于焊接、装配等高精度场景,不建议取消降速保护,可通过优化路径规划(如延长加速时间)减少降速对效率的影响。
部分机器人系统(如 OmniCore)支持 “自定义重启策略”,可在 RobotStudio 中通过 “Motion Policy” 配置文件精细化设置启动速度曲线。
通过以上方法,可根据实际场景平衡安全性与效率,解决暂停重启后的自动降速问题。



