


Powa为ABB最新推出的协作机器人,包括13kg-1.49m 和10kg-1.67m。后续还有更多型号推出。
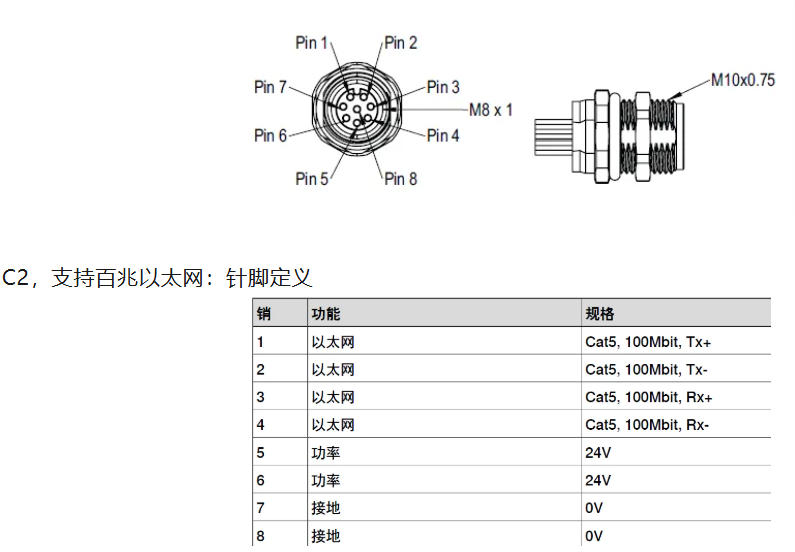
Powa机器人末端有2个通讯端口,C1和C2.
机器人侧接头均为母头:M8,A 码,8 极,母头 (IEC 0.4 Nm 61076-2-104)。 用户需要自行购买对应的M8 公头
C1, 支持用户自定义,具体功能如下图右下角。用户可以在RobotStudio 下载Powa ASI web app并安装到机器人。在示教器打开对应界面进行配置。
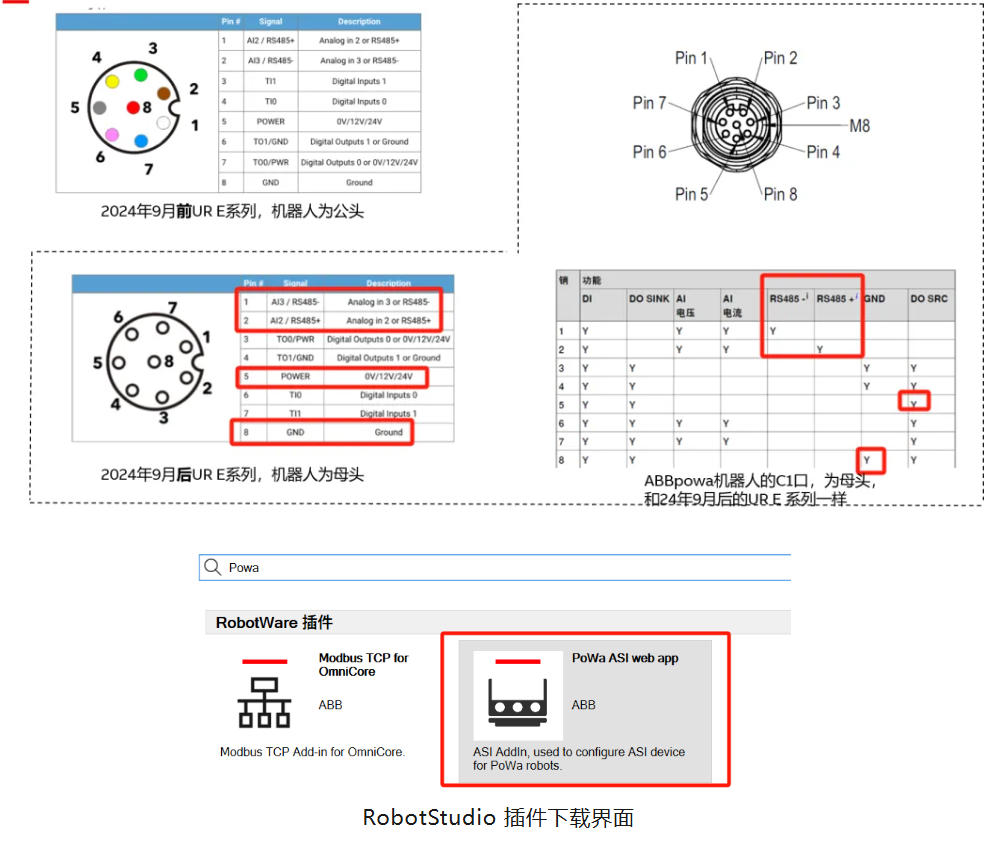
Powa机器人的C1接口,与2024年9月后的UR E系列机器人的末端接口一致 (UR E系列从 2024年9月开始,将原来的公头 改成了 新款的母头,具体见 https://www.universal-robots.com/developer/hardware-and-motion/electrical-interfaces-tool-connector/)
即,如果用户使用的电抓线缆(基于modbus rtu通讯)能连接2024年9月后的UR E机器人,则能直接连接到Powa机器人。
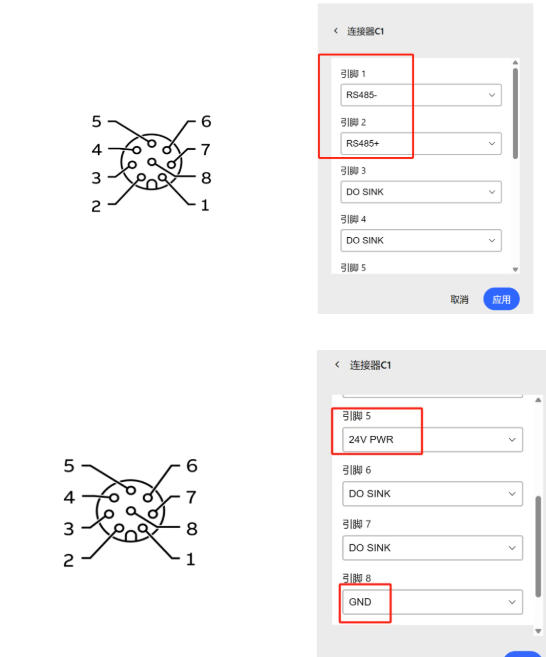
在示教器配置插件中,将引脚1设置为rs485-,引脚2设置为rs485+,引脚5设置为24pwr并通过do将该针脚设置为1,引脚8设置gnd。
Powa末端实质为一块转换板(IP地址为192.168.125.140),接受机器人的ModbusTCP相关指令(基于socket,即RAPID指令通过socketconnect 连接192.168.125.140),并将ModbusTCP转为ModbusRTU通过引脚1 和 引脚2 与设备通讯。
