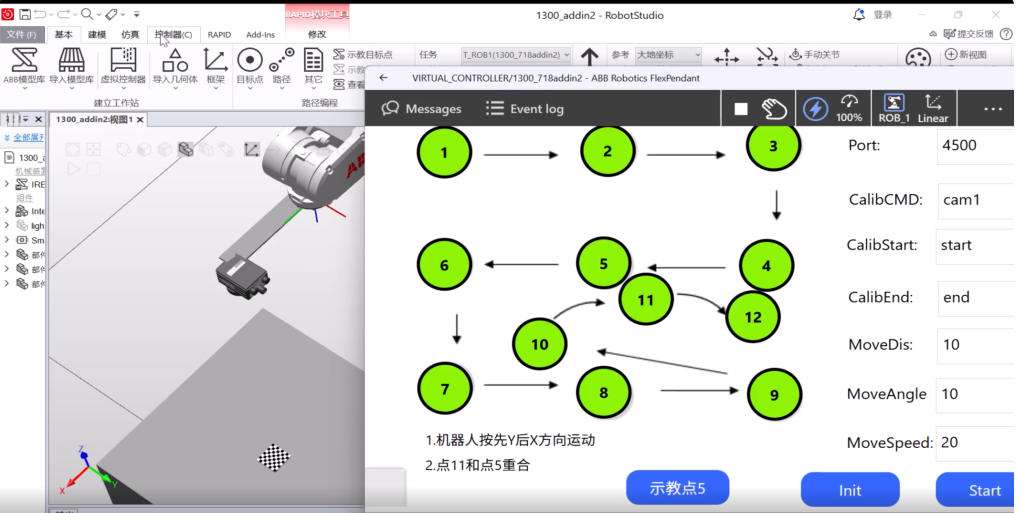
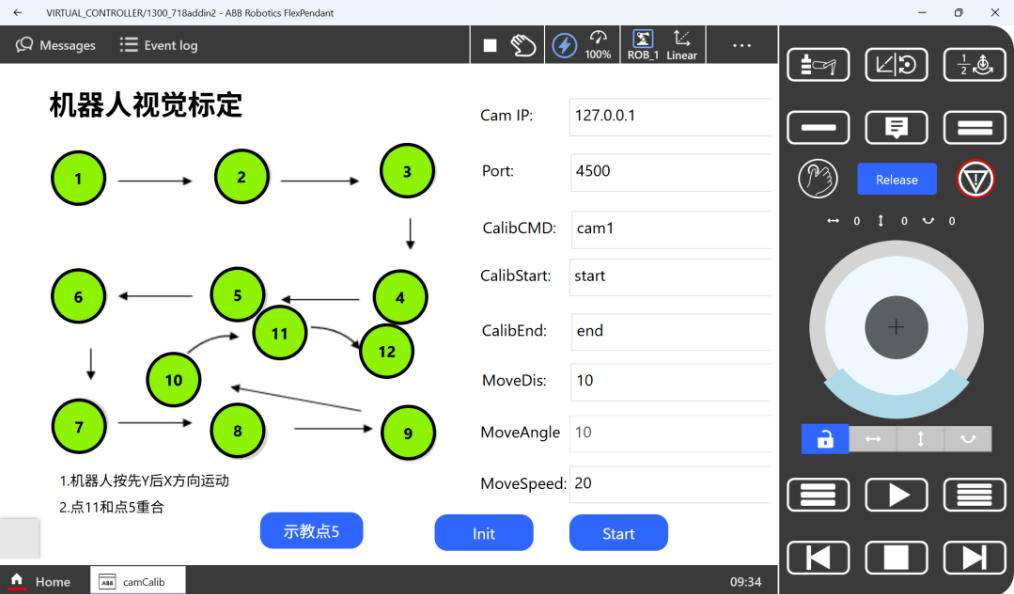
用户只需要在示教器界面,示教中心点5,设置相机ip,端口,触发相机拍照字符串,移动距离,旋转距离,移动速度,机器人即可完成和2D相机的12点标定。
标定过程,机器人每次移动到新点,若拍照识别失败,显示红色,拍照识别正常,显示绿色。
机器人相关代码见文末。
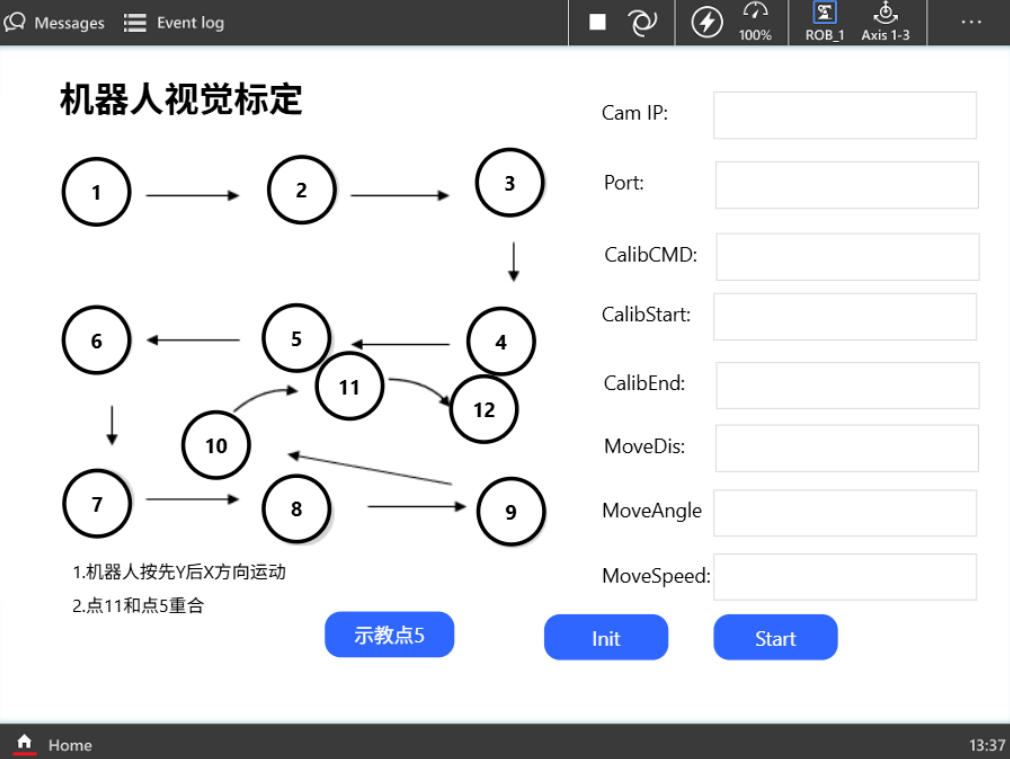
示教器界面,可以通过AppStudio创建。
1. 如上图,在右侧拖入若干text控件,并写入CamIP等字样。
2. 在右侧拖入若干input控件,并关联到rapid中的数据。

3. 在其他软件绘制一个静态图,并在Appstudio插入一个picture控件,选择该静态图。
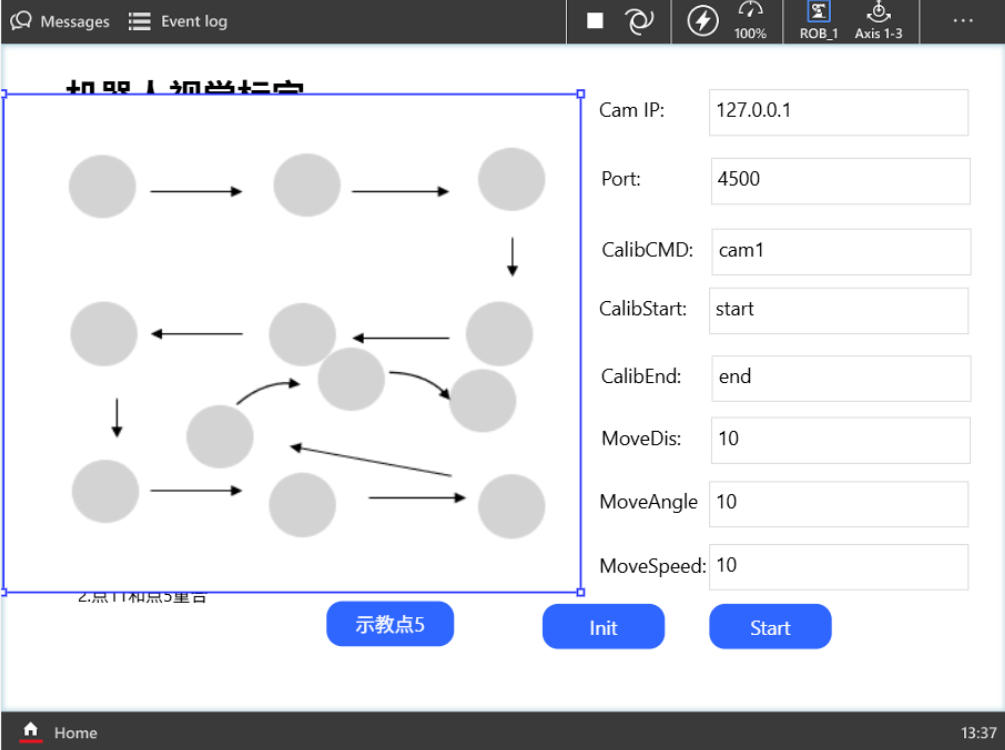
4. 拖入一个button,在右侧修改button的长宽和圆角,得到下图的圆形。并在下方修改边界和背景颜色。

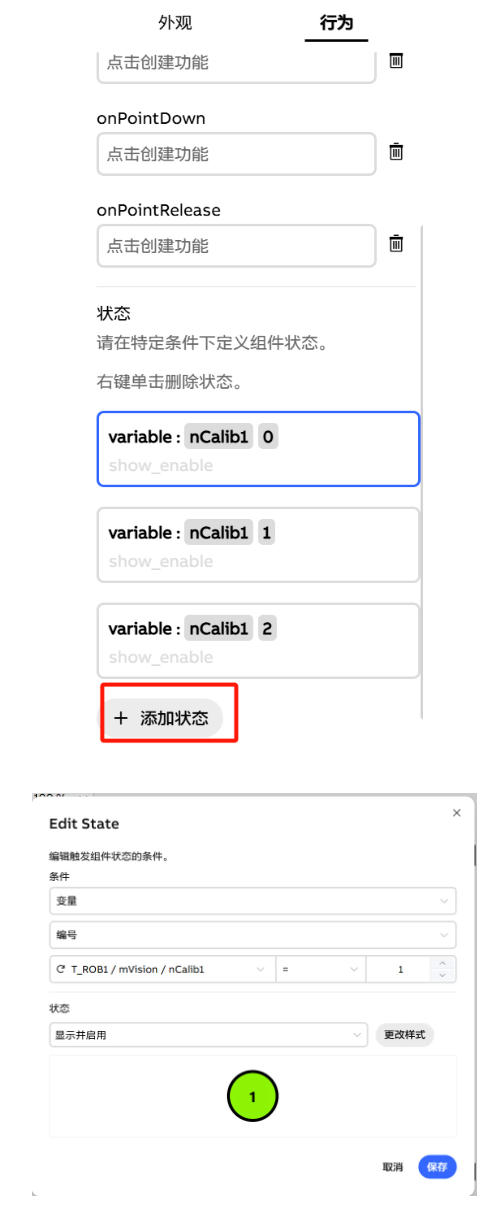
5. 假设rapid中的
nCalib1=0时,圆形按钮背景为白,
nCalib1=1时,圆形按钮背景为绿,
nCalib1=2时,圆形按钮背景为红,
点击button的行为属性,在下方 状态 添加。选择关联nCalib1=0,更改样式,修改背景颜色。其他状态的颜色关联类似。