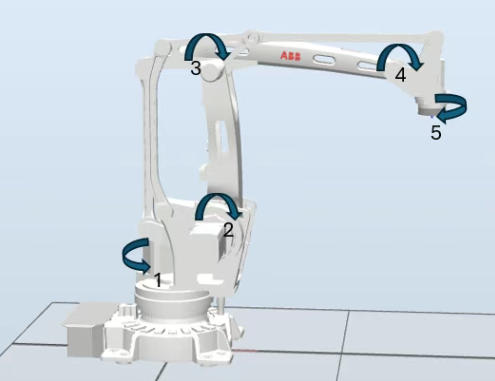
1.典型的码垛机器人如上图(IRB460)。
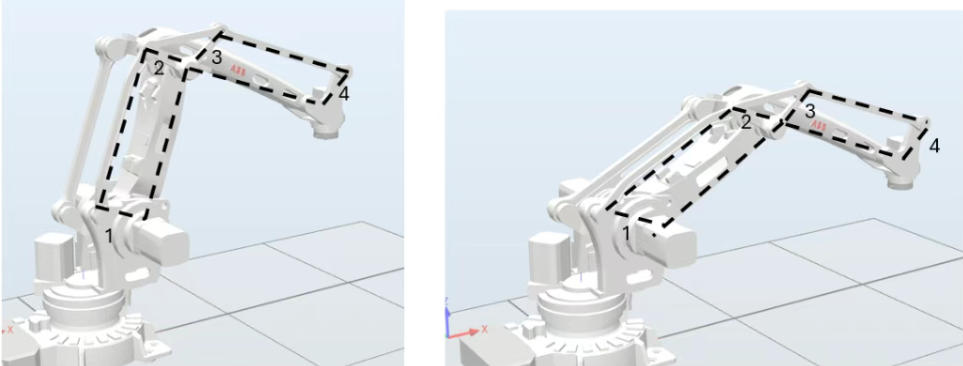
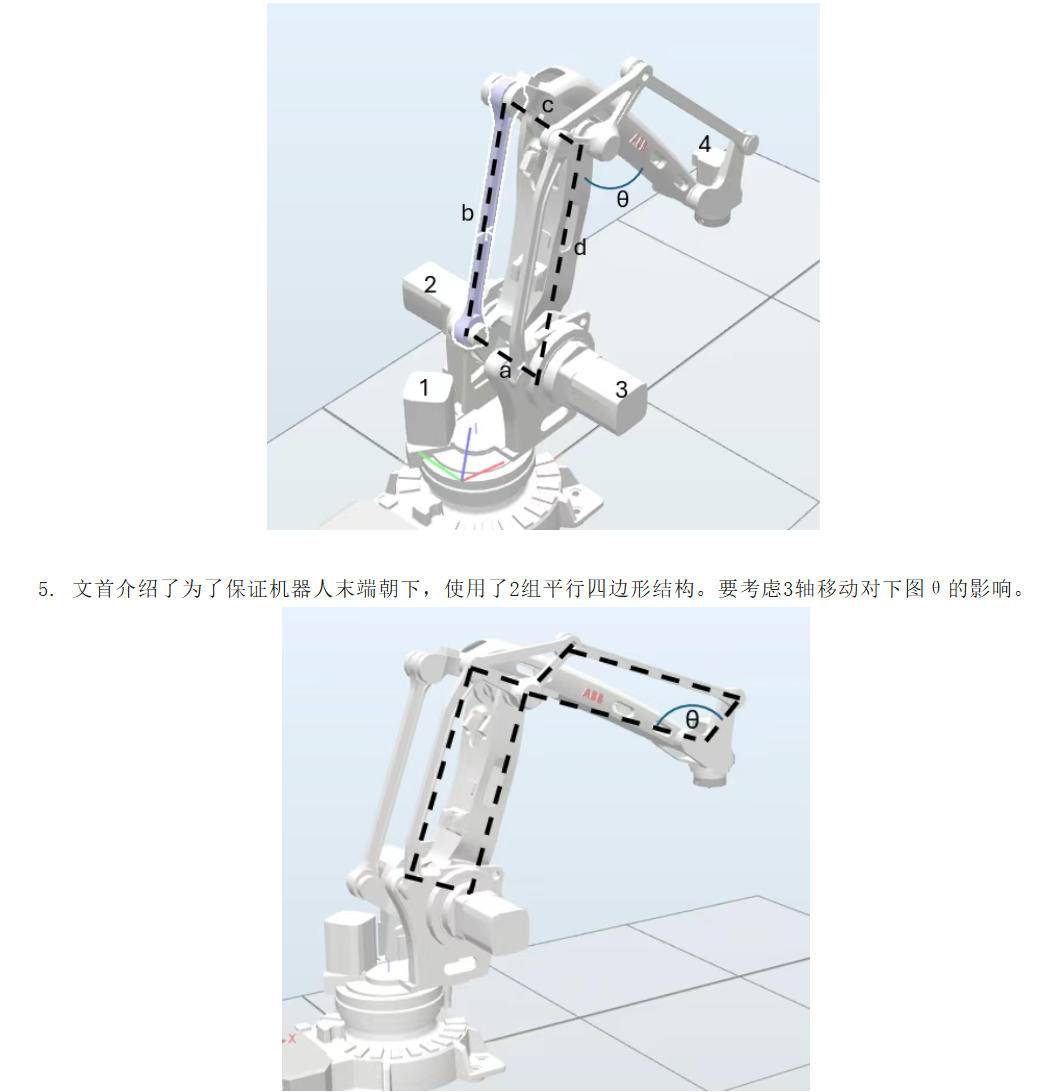
2.码垛机器人实质有5个旋转关节组成。不过上图的关节4可以通过下图的2组平行四边形结构来保证末端的垂直向下。注意图中的1不会移动,这样2,3和4的相对角度关系也不会变。
3.也有下图KUKA PA码垛机器人,直接在末端增加电机(系统自动运算,该轴不会暴露给客户控制),实现末端朝下。

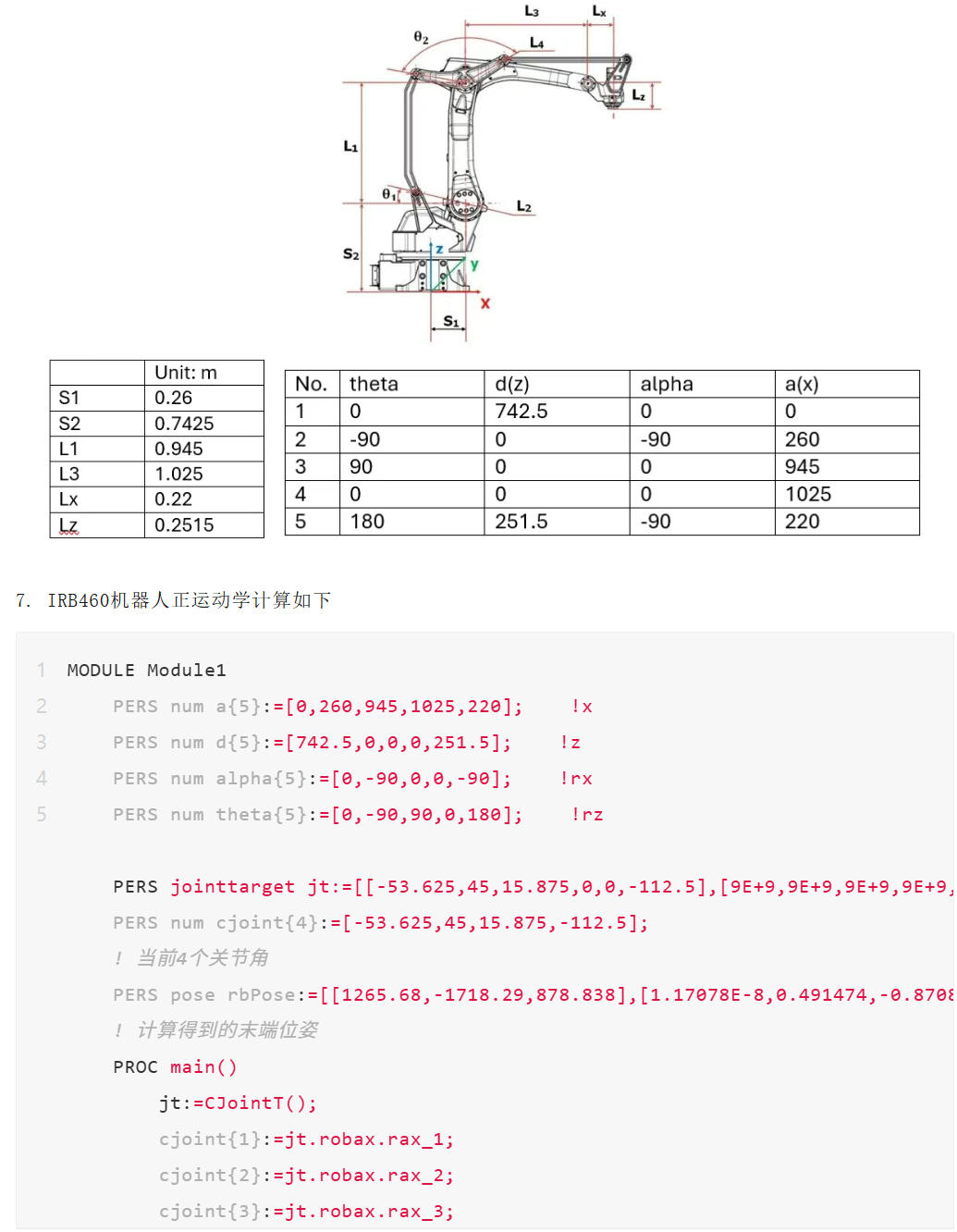
6. IRB460机器人参数如下。
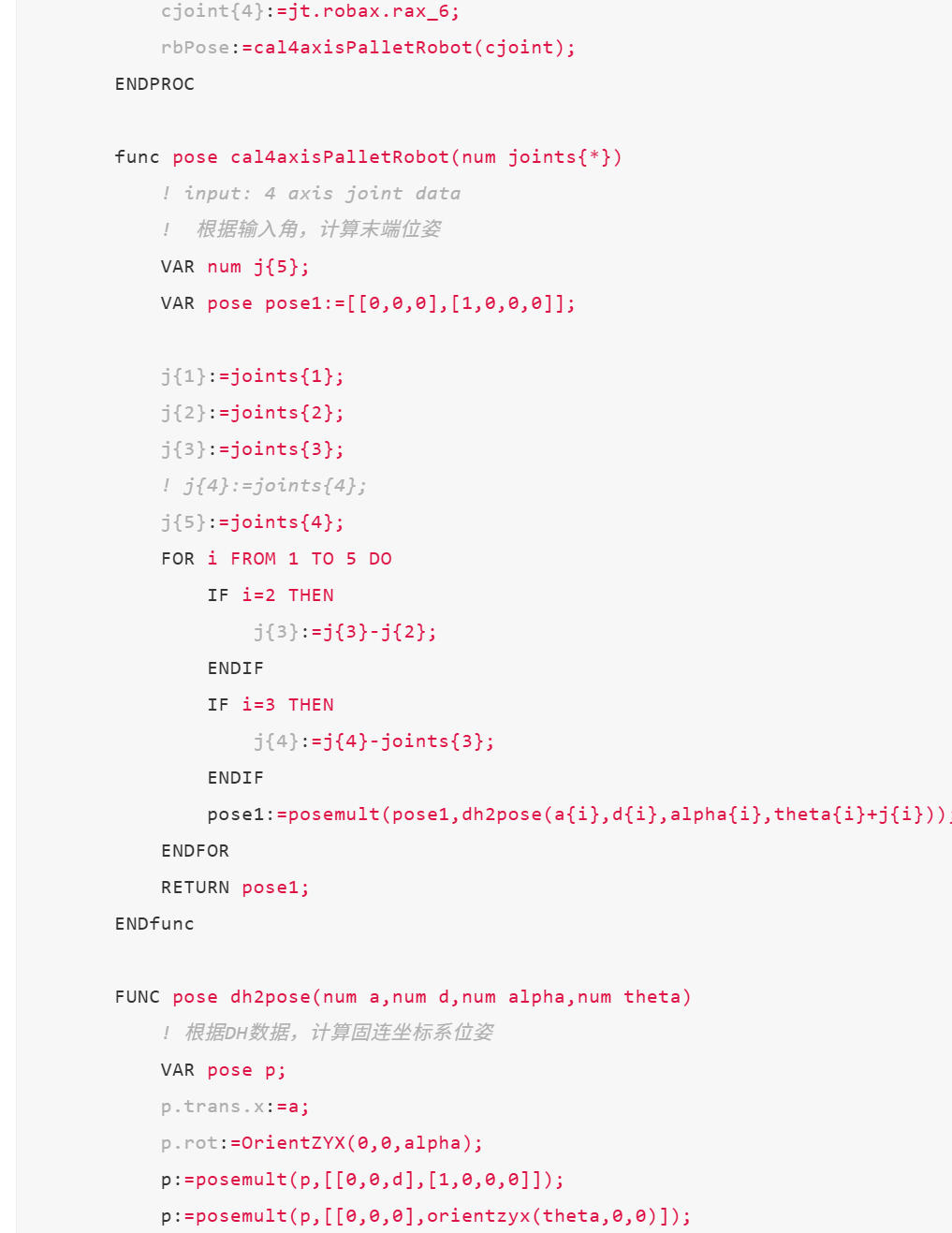
RETURN p; ENDFUNCENDMODULE


站内搜索  新闻分类 新闻分类
联系方式
友情链接 |
新闻中心 4轴码垛机器人原理分析与正运动学计算!
发布时间:2025-12-27 浏览次数:53 返回列表
1.典型的码垛机器人如上图(IRB460)。 2.码垛机器人实质有5个旋转关节组成。不过上图的关节4可以通过下图的2组平行四边形结构来保证末端的垂直向下。注意图中的1不会移动,这样2,3和4的相对角度关系也不会变。
3.也有下图KUKA PA码垛机器人,直接在末端增加电机(系统自动运算,该轴不会暴露给客户控制),实现末端朝下。
6. IRB460机器人参数如下。
RETURN p; ENDFUNCENDMODULE |
